Kingdom Hearts II - Interpolated motion
This documentation is based on the hard work of Kenjiuno’s MSET docs, data from decompilations and animation research.
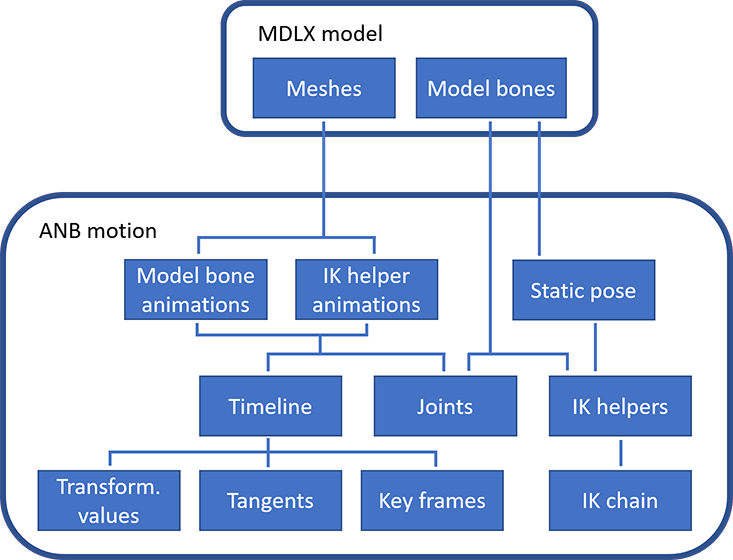
Interpolated motions are a sub-category of a motion file, found inside ANB files.
The purpose of this file is to animate a 3D model. Models are animated using Straight Ahead Animation. That means it uses an initial pose and then it applies Transformations (Scale, rotate, translate) to specific bones at specific times to make the animation.
Since the animation is interpolated, the game engine can seamlessly change the running animation to another animation by interpolating the movement, creating fluidity. Also it is possible to scale the animation at n FPS. Those two advantages are not present in RAW animations.
Also, a motion file can define additional bones, in addition to the bones from the model: those are used by the Inverse Kinematic. For the animation P_EX100\A000 (battle idle), those IK bones are parents of the feet’s bones. That is used to both animate the legs movement in a realistic way and to move the leg up when it performs a collision to the stairs, for instance.
Structure
The file consists of the following structures:
- Motion Header
- Interpolated Motion Header
- Initial Pose: The initial pose of the animation.
- FCurves: The curves that defines a bone’s motion (Scale, rotate, translate) through time. Forward curves first, followed by Inverse.
- Keys: The keys define how the curve is modified at certain points of time.
- Key times
- Key values
- Key tangents
- Constraints: Links a bone to another in a way (Follow position, orientation, direction…)
- Constraint activations
- Constraint limiters
- Expressions: Applies a transformation to a target bone. These transformations are not direct and use an expression / formula instead.
- Expression nodes
- Inverse Kinematic Helpers: Additional “bones” to help with Inverse Kinematic animation.
- Joints
- Root Position: The position of the root throughout the motion.
- External Effectors: Unknown. Possibly to aid on interaction with other objects.
Motion header
This is a continuation of the motion header. The very top header is exactly the same as the RAW motions, but the rest of the structure is compeltely different.
Interpolated motion header
Located straight after the motion header, it defines where all the structures are phyisically located inside the files. All the offsets uses 0x90 as origin. Some of the tables have no count, but only their offset. It is speculated that the game engine do not need to know their amount because there is no need to loop through them: other tables will reference them through an index.
| Offset | Type | Description |
|---|---|---|
| 0x00 | short | Bone count. Must match with the bone count of the model |
| 0x02 | short | Total bone count. This is Bone Count + IK Bone Count |
| 0x04 | int | Total frame count. How many frames the animation contains |
| 0x08 | int | IK helpers offset |
| 0x0C | int | Joint indices offset |
| 0x10 | int | Key times count |
| 0x14 | int | Initial pose offset |
| 0x18 | int | Initial pose count |
| 0x1C | int | Root Position offset |
| 0x20 | int | F-Curves Forward offset |
| 0x24 | int | F-Curves Forward count |
| 0x28 | int | F-Curves Inverse offset |
| 0x2C | int | F-Curves Inverse count |
| 0x30 | int | F-Curve Keys offset |
| 0x34 | int | Key Times offset |
| 0x38 | int | Key Values offset |
| 0x3C | int | Key Tangents offset |
| 0x40 | int | Constraints offset |
| 0x44 | int | Constraints count |
| 0x48 | int | Constraint Activations offset |
| 0x4C | int | Limiters offset |
| 0x50 | int | Expressions offset |
| 0x54 | int | Expressions count |
| 0x58 | int | Expression Nodes offset |
| 0x5C | int | Expression Nodes count |
| 0x60 | vec4f | Bounding Box minimum |
| 0x70 | vec4f | Bounding Box maximum |
| 0x80 | float | Frame start |
| 0x84 | float | Frame end |
| 0x88 | float | Frames per second, defines the LFR |
| 0x8c | float | Frame return, expressed in LFR |
| 0x90 | int | External Effectors offset |
| 0x94 | int[3] | Reserved |
Initial pose
It is responsible to set the model into the initial pose.
| Offset | Type | Description |
|---|---|---|
| 0x00 | short | Bone index |
| 0x02 | short | Channel ID |
| 0x04 | float | Value to assign to the channel |
F-Curves
Specifies how a specific bone should animate over time. The curve is modified by a series of keys. This Blender document helps visualize how the curves and their keys work.
| Offset | Type | Description |
|---|---|---|
| 0x00 | short | Bone / IK Helper index |
| 0x02 | 4-bit | Channel ID |
| 0x02 | 2-bit | Pre-type |
| 0x02 | 2-bit | Post-type |
| 0x03 | byte | Key count |
| 0x04 | short | Key start index |
The table for the Forward Kinematic animation (skeleton) is followed by the table for the Inverse Kinematic animation (IK Helpers), which has the same structure. The IK Helper index starts from 0.
Cycle type
| Channel | Description |
|---|---|
| 0 | First / Last key |
| 1 | Subtractive / Additive |
| 2 | Repeat |
| 3 | Zero |
F-Curve Keys
The keys that modify the F-Curves at specific times.
| Offset | Type | Description |
|---|---|---|
| 0x00 | 2-bit | Interpolation type |
| 0x00 | 14-bit | Time index |
| 0x02 | short | Value index |
| 0x04 | short | Tangent index for ease-in (left) |
| 0x06 | short | Tangent index for ease-out (right) |
Interpolation types
| Value | Description |
|---|---|
| 0 | Constant |
| 1 | Linear |
| 2 | Hermite |
Key Times
List of floats to define at which time a key applies. Measured in frames. Note that there can be decimal values, hence they apply between frames.
Key Values
List of floats used as values for the keys’ transformations.
Key Tangents
List of floats used as values for the keys’ tangents.
Constraints
Constraints a bone to another in a way (Follow position, orientation, direction…). Usually, the model bones connect to are ankles or hands as those are what it’s most likely to use IK.
| Offset | Type | Description |
|---|---|---|
| 0x00 | byte | Constraint type index |
| 0x01 | byte | Temporary active flag |
| 0x02 | short | Constrained joint index |
| 0x04 | short | Source joint index |
| 0x06 | short | Limiter index; -1 when not used |
| 0x08 | short | Activation count |
| 0x0A | short | Activation start index |
Joint indexes refers to the bones followed by the IK helpers.
Constraint type
| Channel | Description |
|---|---|
| 0 | Position |
| 1 | Path |
| 2 | Orientation |
| 3 | Direction |
| 4 | Up Vector |
| 5 | Two Points |
| 6 | Scale |
| 7 | Camera |
| 8 | Camera Path |
| 9 | Int Path |
| 10 | Int |
| 11 | Camera Up Vector |
| 12 | Position Limit |
| 13 | Rotation Limit |
Constraint Activations
Activations used in constraints. Use not known.
| Offset | Type | Description |
|---|---|---|
| 0x00 | float | Time |
| 0x04 | int | Active |
Constraint Limiters
Defines multiple limits for the constraint.
| Offset | Type | Description |
|---|---|---|
| 0x00 | 3b | type |
| 0x00 | 1b | global |
| 0x00 | 1b | x min |
| 0x00 | 1b | x max |
| 0x00 | 1b | y min |
| 0x00 | 1b | y max |
| 0x00 | 1b | z min |
| 0x00 | 1b | z max |
| 0x00 | 22b | Reserved |
| 0x04 | int | Padding |
| 0x08 | float | Damping Width |
| 0x0A | float | Damping Strength |
| 0x0E | vec4f | Min |
| 0x1E | vec4f | Max |
Expressions
Applies a transformation to a target bone. These transformations are not direct and use an expression / formula instead.
| Offset | Type | Description |
|---|---|---|
| 0x00 | short | Joint index |
| 0x02 | short | Channel ID |
| 0x04 | short | Reserved |
| 0x06 | short | Node index |
The joint always applies to an IK Helper.
Expression Nodes
Nodes used by expressions. It seems to be a graph, where every node can point to multiple nodes.
| Offset | Type | Description |
|---|---|---|
| 0x00 | byte | Type index |
| 0x01 | byte | isGlobal (1bit + 7 reserved) |
| 0x02 | short | Element (-1 when unused) |
| 0x04 | float | Value |
| 0x08 | short | CAR (Node index or -1 when unused) |
| 0x0a | short | CDR (Node index or -1 when unused) |
Expression type
| Index | Description |———|————— | 0 | FUNC_SIN | 1 | FUNC_COS | 2 | FUNC_TAN | 3 | FUNC_ASIN | 4 | FUNC_ACOS | 5 | FUNC_ATAN | 6 | FUNC_LOG | 7 | FUNC_EXP | 8 | FUNC_ABS | 9 | FUNC_POW | 10 | FUNC_SQRT | 11 | FUNC_MIN | 12 | FUNC_MAX | 13 | FUNC_AV | 14 | FUNC_COND | 15 | FUNC_AT_FRAME | 16 | FUNC_CTR_DIST | 17 | FUNC_FMOD | 18 | OP_PLUS | 19 | OP_MINUS | 20 | OP_MUL | 21 | OP_DIV | 22 | OP_MOD | 23 | OP_EQ | 24 | OP_GT | 25 | OP_GE | 26 | OP_LT | 27 | OP_LE | 28 | OP_AND | 29 | OP_OR | 30 | VARIABLE_FC | 31 | CONSTANT_NUM | 32 | FCURVE_ETRNX | 33 | FCURVE_ETRNY | 34 | FCURVE_ETRNZ | 35 | FCURVE_ROTX | 36 | FCURVE_ROTY | 37 | FCURVE_ROTZ | 38 | FCURVE_SCALX | 39 | FCURVE_SCALY | 40 | FCURVE_SCALZ | 41 | LIST | 42 | ELEMENT_NAME | 43 | FUNC_AT_FRAME_ROT | -1 | EXPR_UNKNOWN
Inverse Kinematic helper
Creates additional “joints”, in a very similar way the bones or a skeleton are structured. Please see Constraints to know more. Its strucutre is exactly the same as the one found on MDLX’s models.
| Offset | Type | Description |
|---|---|---|
| 0x00 | short | Bone index |
| 0x02 | short | Sibling bone index |
| 0x04 | short | Parent bone index (-1 if root) |
| 0x06 | short | Child bone index (-1 if root) |
| 0x08 | int | Reserved |
| 0x0C | int | Flags (10b unknown, 19b reserved, 1b enableBias, 1b below, 1b terminate) |
| 0x10 | float | Scale X |
| 0x14 | float | Scale Y |
| 0x18 | float | Scale Z |
| 0x1C | float | Scale W |
| 0x20 | float | Rotate X |
| 0x24 | float | Rotate Y |
| 0x28 | float | Rotate Z |
| 0x2C | float | Rotate W |
| 0x30 | float | Translate X |
| 0x34 | float | Translate Y |
| 0x38 | float | Translate Z |
| 0x3C | float | Translate W |
Joint definition
The list of bones + IK Helpers. The order is not clear, but bones are in order on IK Helpers appear in the list based on both their IK parent and constrained bone. If we structure it as a graph it seems to be stored as pre-order traversal. The order is important as the game engine calculate first the matrix of both Model’s skeleton root and IK helper root.
| Offset | Type | Description |
|---|---|---|
| 0x00 | short | Joint index |
| 0x02 | 2b | ik |
| 0x02 | 1b | translation |
| 0x02 | 1b | rotation |
| 0x02 | 1b | fixed |
| 0x02 | 1b | calculated |
| 0x02 | 1b | calculated matrix 2 rotation |
| 0x02 | 1b | external effector |
| 0x03 | byte | Reserved |
Root Position
Defines the position of the object’s root as well as it’s movement through time.
| Offset | Type | Description |
|---|---|---|
| 0x00 | vec4f | Scale |
| 0x10 | vec4f | Rotation |
| 0x20 | vec4f | Translation |
| 0x30 | int[9] | FCurve Forward index (-1 if unused) |
External Effectors
Unknown. Possibly to aid on interaction with other objects. They point to an IK Helper.
| Offset | Type | Description |
|---|---|---|
| 0x00 | short | Joint index |
Common Enum
Channels
| Channel | Description |
|---|---|
| 0 | Modify scale.x |
| 1 | Modify scale.y |
| 2 | Modify scale.z |
| 3 | Modify rotate.x |
| 4 | Modify rotate.y |
| 5 | Modify rotate.z |
| 6 | Modify translate.x |
| 7 | Modify translate.y |
| 8 | Modify translate.z |
| -1 | Unknown (Fail-safe) |